14.10.2107 zurück
Jetzt hab ich Elternzeit, also habe ich mir meine Liste rausgezogen und einfach mal alles bestellt.
Die Fahrtenregler kosten in Deutschland übrigens um die 45€ + 3€ Porto, Händler ist hier in der Region. Ich hab die Teile dann in Hongkong bestellt, für 21€ versandkostenfrei. Die Welt ist verrückt. Die Regler gingen dann über England, ich glaube so umgehen die Händler aus Fernost vielleicht die Zollkontrollen. Bei den Motoren war es ähnlich, auch die sind aus China, gingen über Hongkong – England nach Deutschland. Der Händler hat mir auf Nachfrage Rabatt gegeben, weil ich 2 gekauft habe.
Ich hab mir überlegt, ich schraube die ganze Elektronik an ein Brett, mach Räder dran und teste dann erst mal alles, bevor ich die finale Planung des Rasenmähers angehe. Außerdem fehlt mir ja auch noch der Rasenmäher 😉
Ein kurzer Ausflug zum Baumarkt, ein Reststück Multiplexplatte, Schrauben, Winkel, eine Schwerlastrolle und andere Kleinigkeiten besorgt, dann ab in die Werkstatt.

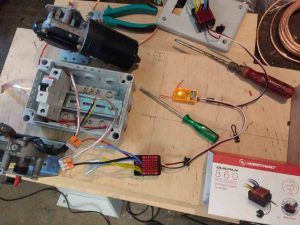
Zuerst befestige ich die Halterungen für die Motoren und die Abzweigdose für die Fahrtenregler.
Den Empfänger klebe ich außerhalb der Abzweigdose einfach ans Brett.


Der erste Testlauf war gut, ich hab alles provisorisch zusammen geknubbelt, den Empfänger mit der Fernbedienung gebunden, die Fahrtenregler auf Crawler gestellt und die Motoren haben ihr erstes Lebenszeichen von sich gegeben.
Ich hab noch die Räder von unserm alten Bollerwagen demontiert, die will ich direkt auf die Motorwelle setzten. Damit das Gewicht durch die Autobatterie etc. nicht voll auf dem Getriebe des Motors hängt, habe ich die Welle nochmal mit einem Kugellager abgefangen, bevor ich das Rad montiere.

Beim Anbringen vom Rad an den Motor musste ich ein bisschen basteln. Die Motoren haben nur ein kurzes M8 Gewinde, und meine Bollerwagenräder sind für Gleitlager gedacht. Ich habe eine Gewindemuffe auf den Motor geschraubt und mit einem Splint gesichert. Am Rad habe ich auch gebastelt, so dass das Rad am Schluss fest auf einer Schraube sitzt, die ich dann auf der anderen Seite der Gewindemuffe einschrauben kann. Auch diese Verbindung sichere ich mit einem Splint, damit sich das Rad beim Fahren nicht abschraubt.

Das Brettchen rollt, und über den Kreuzmischer der Fernbedienung lässt sich auch die Lenkung realisieren. Dazu werden die Räder einfach mit unterschiedlicher Drehzahl angesteuert. Beim Testen hat sich leider herausgestellt, dass ich mit 2 Mischern (die Spektrum hat nicht mehr) zwar die Lenkung wie bei einem Kettenfahrzeug realisieren kann, beim Geradeausfahren werden die Motoren aber nicht mehr voll angesteuert. Unterm Strich heißt das, die Kiste ist ein bisschen langsamer als erwartet. Hier muss ich zukünftig eine Übersetzung benutzen.
Ich hab die Batterie ein bisschen weit nach hinten gesetzt, so dass mein Gefährt beim schnellen Anfahren einen ordentlichen Hochstart hinlegt. Den Platz will ich für ein Zusatzgewicht nutzen. Wenn die Motoren mal den Rasenmäher und einen stabilen Rahmen bewegen müssen, wird die Kiste deutlich schwerer. Zum Test hab ich gedacht, dass meine Kleine ja mal ne Runde auf Papas Rasenmäher drehen kann. Deshalb hab ich noch schnell einen provisorischen Kindersitz drauf gebaut.

Damit ist der erste Prototyp für den Test der Elektronikkomponenten fertig 🙂